VC_6_0和Matlab编程矩阵电路程序.pdf VC_6_0实现客户端与服务器端通讯.pdf VC_6_0实现计算方法中的曲线拟合.pdf VC_6_0读写Access数据库中图像字段的方法研究.pdf VC_6_0通过ADO连接数据库的通用方法研究.pdf VC_SQL...
”Prime算法 矩阵存储 vc “ 的搜索结果
VC_6_0和Matlab编程矩阵电路程序.pdf VC_6_0实现客户端与服务器端通讯.pdf VC_6_0实现计算方法中的曲线拟合.pdf VC_6_0读写Access数据库中图像字段的方法研究.pdf VC_6_0通过ADO连接数据库的通用方法研究.pdf VC_SQL...
VC_6_0和Matlab编程矩阵电路程序.pdf VC_6_0实现客户端与服务器端通讯.pdf VC_6_0实现计算方法中的曲线拟合.pdf VC_6_0读写Access数据库中图像字段的方法研究.pdf VC_6_0通过ADO连接数据库的通用方法研究.pdf VC_SQL...
INT202 算法复杂度 笔记
标签: 算法



首先基于语料库构建词的共现矩阵,然后基于共现矩阵和GloVe模型学习词向量。 对词向量计算相似度可以用cos相似度、spearman相关系数、pearson相关系数;预训练词向量可以直接用于下游任务,也可作为模型参数在下游...
算法学习与应用从入门到精通
标签: 算法基础
第14章 解决奥赛问题

由于本章内容繁杂,篇幅较长,故分成了四部分来讲解,各部分主要内容分别为:交错网格、同位网格、边界条件、SIMPLE家族算法。 这里是第一部分,主要讲解不可压缩流动问题的求解在常规网格上所碰到的问题,以及,...

读书笔记:多智能体机器学习(二)
标签: 其他

这是视觉里程计的最后一个介绍,在第一个部分介绍了特征点法用于采集图像之间的特征,在匹配好特征点后,我们可以得到两个一一对应的像素点集。接下来要做的,就是根据两组匹配好的点集,计算相机的运动了。...
初识C++
C语言基础实例
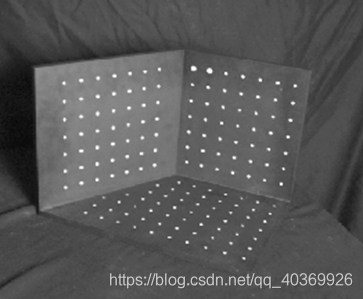
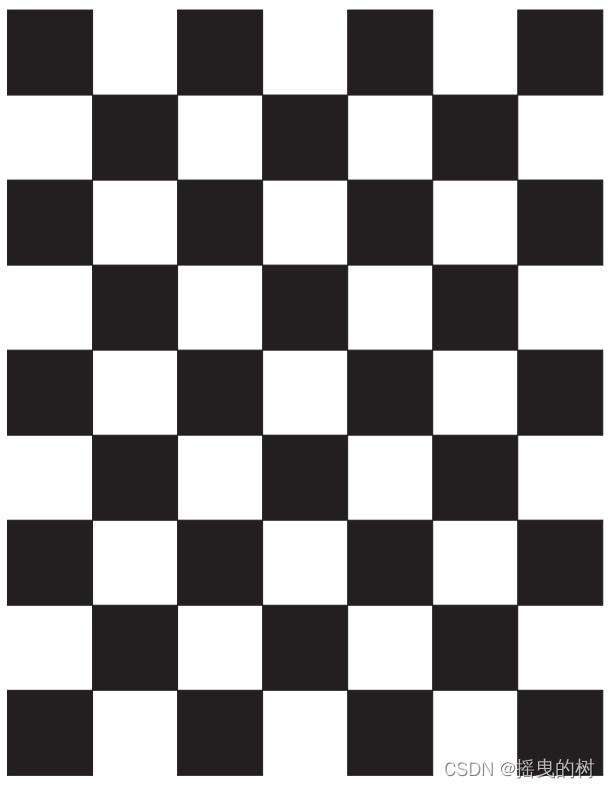
2.4.1.2 张正友相机标定法
标签: 自动驾驶
传统标定法的标定板是需要三维的,需要非常精确...矩阵中未知的5个参数。相机标定指建立相机图像像素位置与场景点位置之间的关系,根据相机成像模型,由特征点在图像中坐标与世界坐标的对应关系,求解相机模型的参数。

12345
本菜狗的题解。各位大佬还请轻喷
第4章 函数和递归【教学内容相关章节】4.1数学函数 4.2地址的指针 4.3递归 4.4本章小结【教学目标】(1)掌握多参数、单返回值的数学函数的定义和使用方法;(2)学会用typedef定义结构体;(3)学会用assert宏帮助...

1.相机标定原理及介绍 1.1 简介 相机标定的目的和意义在于我们所处的世界是三维的,而照片是二维的,这样我们可以把相机认为是一个函数,输入量是一个场景,输出量是一幅灰度图。这个从三维到二维的过程的函数是不...
自己用的数论板子
相机标定是指确定相机的内部参数和外部参数的过程。内部参数包括相机的焦距、像素尺寸、主点位置等;外部参数包括相机的位置、朝向等。...相机标定的目的是获得准确的相机参数,从而保证图像处理算法的精度和鲁棒性。

FM(Factorization Machines)和FFM(Field-aware Factorization Machines)主要应用于稀疏特征矩阵中的CTR预估。本文对其进行简单介绍,希望对大家有所帮助。 1.FM FM模型使用因子分解的方式计算变量之间的交互项,能够...

推荐文章
- c语言链表查找成绩不及格,【查找链表面试题】面试问题:C语言学生成绩… - 看准网...-程序员宅基地
- 计算机网络:20 网络应用需求_应用对网络需求-程序员宅基地
- BEVFusion论文解读-程序员宅基地
- multisim怎么设置晶体管rbe_山东大学 模电实验 实验一:单极放大器 - 图文 --程序员宅基地
- 华为OD机试真题-灰度图恢复-2023年OD统一考试(C卷)-程序员宅基地
- 【机器学习】(周志华--西瓜书) 真正例率(TPR)、假正例率(FPR)与查准率(P)、查全率(R)_真正例率和假正例率,查准率,查全率,概念,区别,联系-程序员宅基地
- Python Django 版本对应表以及Mysql对应版本_django版本和mysql对应关系-程序员宅基地
- Maven的pom.xml文件结构之基本配置packaging和多模块聚合结构_pom <packaging>-程序员宅基地
- Composer 原理(二) -- 小丑_composer repositories-程序员宅基地
- W5500+F4官网TCPClient代码出现IP读取有问题,乱码问题_w5500 ping 网络助手 乱码 send(sock_tcps,tcp_server_buff,-程序员宅基地